概述
本章介绍如何搭建 GCC 编译环境,包括 Windows 平台和 Linux 平台。
Windows 平台:以 Windows 10 64-bit 为例
Linux 平台:以 Ubuntu 22.04 x86_64 为例
准备 GCC 编译环境
GCC 编译环境包括 CMake 编译环境、Python 环境,以及其他一些工具软件,如下表所示:
软件 |
版本 |
|---|---|
cmake |
3.20 及以上 |
ninja |
1.10.1 及以上 |
make |
3.82 及以上 |
ccache |
4.5.1 及以上 |
Python3 |
3.10 及以上 |
wget |
推荐最新版 |
7zip |
推荐最新版 |
用户可以下载 Realtek 提供的软件合集包,并在编译前运行脚本自动配置环境变量。这种方式不会影响用户原先的软件环境,并且可以避免因软件版本带来的兼容性问题。
下载压缩包并解压至
/opt/rtk-toolchain文件夹下mkdir /opt/rtk-toolchain cd /opt/rtk-toolchain wget https://github.com/Ameba-AIoT/ameba-toolchain/releases/download/prebuilts-v1.0.3/prebuilts-linux-1.0.3.tar.gz tar -xzf prebuilts-linux-1.0.3.tar.gz
如果下载遇到问题,可尝试使用 aliyun 地址:
wget https://rs-wn.oss-cn-shanghai.aliyuncs.com/prebuilts-linux-1.0.3.tar.gz备注
压缩包需要解压到默认的
/opt/rtk-toolchain路径下。如需更改默认路径,请参考 更改工具链安装路径。预安装 Python(Linux 下不提供 Python 的免安装版本)
sudo apt install python3 python3-pip python3-venv备注
运行
python --version检查 Python 版本, 建议大于 3.10。如果主机中存在多个 Python 版本,可以使用命令
update-alternatives --install /usr/bin/python python /usr/bin/python3.x 1选择特定 Python 版本,x 代表期望的版本号。如果报错
command 'python' not found,尝试运行ln -s /usr/bin/python3 /usr/bin/python解决问题。
安装依赖库
sudo apt install libssl-dev libncurses5进入 SDK 根目录,运行
ameba.sh脚本,自动配置环境变量。source ameba.sh PIP CHECK... All packages are installed correctly! ======================================================== | First choose IC platform: cd [IC]_gcc_project | Configure command: menuconfig.py | Build command: build.py ======================================================== (.venv)
备注
每次重启终端后,都需要执行 source ameba.sh 命令设置环境变量。
在 C 盘下新建
C:\rtk-toolchain文件夹下载压缩包并解压至
C:\rtk-toolchain文件夹下备注
压缩包需要解压到默认的
C:\rtk-toolchain路径下。如需更改安装路径,请参考 更改工具链安装路径。进入 SDK 根目录, 双击 运行根目录下的
ameba.bat,将自动配置环境变量,后续请继续在此窗口运行命令。PIP CHECK... All packages are installed correctly! ======================================================== | First choose IC platform: cd [IC]_gcc_project | Configure command: menuconfig.py | Build command: build.py ======================================================== (.venv) C:\sdk>
备注
如果用户想在 Windows 下使用 Git Bash 或 MSYS2 等类 Unix 的命令行环境,请在 SDK 根目录下打开新终端后运行
source ameba.sh。
小技巧
此方式依赖 Python 虚拟环境。若出现 Python 系统错误,如提示找不到 dll 动态库等,请尝试手动删除 SDK 根目录下的 .venv 文件夹并运行 ameba.bat 脚本,将自动重新安装 Python 虚拟环境。
安装工具链
默认情况下,工具链会在第一次编译项目时被自动安装到默认路径下:
Linux:
/opt/rtk-toolchainWindows:
C:\rtk-toolchain
在进行项目编译前,我们会检查工具链是否被正确安装以及版本是否匹配。如果弹出报错信息,请根据报错信息修复问题并尝试重新编译。
工具链压缩包默认托管在 GitHub 上,首次编译时会尝试从 GitHub 下载工具链压缩包。如果下载遇到问题,请确认主机是否可以正确访问 GitHub。如果无法正常访问,请通过以下命令更换下载源:
build.py -D USE_ALIYUN_URL=True
如果需要修改工具链的安装路径,请在系统中创建环境变量
RTK_TOOLCHAIN_DIR,并将其赋值为修改后的安装路径。打开
~/.bashrc文件,在其末尾添加:export RTK_TOOLCHAIN_DIR="/path/to/your/toolchain/dir"
运行以下命令使环境变量立即生效:
source ~/.bashrc
在 选项中新建变量:
变量名为
RTK_TOOLCHAIN_DIR变量值为用户希望的安装路径
重启终端使环境变量生效。
备注
完成上述安装步骤后,在 rtk-toolchain 路径下将有以下文件:
|--- prebuilts-[win/linux]-1.x.x
|
|--- asdk-10.3.1-xxxx
|
|--- vsdk-10.3.1-xxxx
SDK 路径
配置及编译 SDK 需要在 SoC 的 project 路径下进行,对应路径下均放置了供配置及编译的 Python 脚本。
SoC 对应的 GCC project 路径如下所示:
{SDK}/amebadplus_gcc_project
{SDK}/amebalite_gcc_project
{SDK}/amebalite_gcc_project
{SDK}/amebalite_gcc_project
{SDK}/amebasmart_gcc_project
{SDK}/amebagreen2_gcc_project
备注
将 {SDK} 替换为用户自己的 SDK 路径。
配置 SDK(menuconfig)
用户可通过项目对应的 menuconfig.py 脚本配置 SDK。
配置步骤
进入
{SDK}/amebaxxx_gcc_project目录。在 Windows 的命令提示符窗口或 Linux 终端下运行
menuconfig.py命令。正确运行命令后,终端会显示如下可视化界面,用户可通过:
方向键选择需设置的配置
空格 或 回车 键进行选中/取消选中
ESC 键返回上一层
Q 键退出
--------MENUCONFIG FOR General--------- CONFIG BOOT OPTION ---> CONFIG TrustZone ---> CONFIG Mass Production ---> CONFIG Linux ---> CONFIG AT CMD ---> CONFIG RTK Assert Level ---> CONFIG VFS ---> CONFIG OS ---> CONFIG OTA OPTION ---> CONFIG USB ---> CONFIG APPLICATION ---> -----Connectivity Config----- CONFIG WHC INTF ---> CONFIG WIFI ---> CONFIG BT ---> CONFIG LWIP ---> CONFIG SSL ---> CONFIG WPAN ---> CONFIG COEX ---> ---------Test Config--------- Verification and Test ---> --------Build Config--------- Build Option ---> -----end of MENUCONFIG FOR General----- MENUCONFIG FOR KM0 CONFIG ---> MENUCONFIG FOR KM4 CONFIG ---> MENUCONFIG FOR CA32 CONFIG ---> ----- DO NOT ENTER IN THIS BUTTON ------ MENUCONFIG FOR Private --->
退出 menuconfig 菜单后,UI 会提示用户是否保存配置。若选择保存,配置将被存放到当前目录下的
menuconfig文件夹中。文件夹内一般包含以下几项:
.config文件:保存着用户选择的配置项。.config_{MCU}文件:分配到每个 MCU 的最终配置文件,如.config_km4,.config_km0,这些文件是基于.config文件二次处理的产物。project_{MCU}/platform_autoconf.h:根据最终配置文件生成的头文件,供 C/C++ 源文件引用。
备注
每次配置完成的结果会保存到
menuconfig/.config文件,且此文件会在下一次手动配置时被加载。打开 menuconfig 进行可视化配置时,可以看到前一次的配置记录,即这种方式的配置是 有记忆的。
初始配置
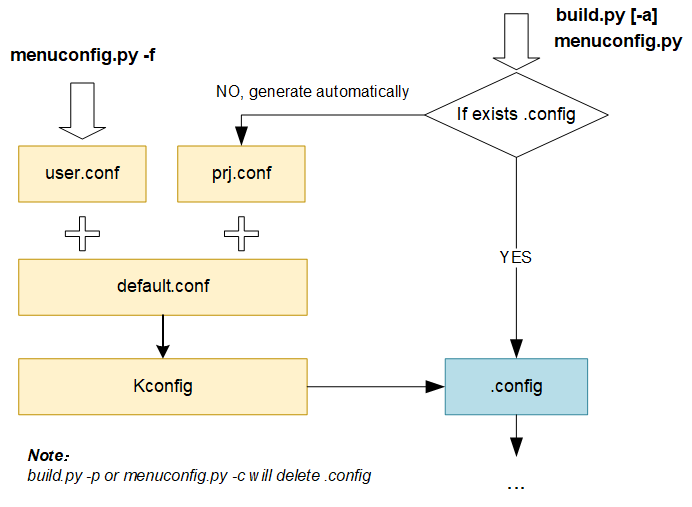
项目的配置从 menuconfig/.config 解析得来。但当项目不存在 menuconfig/.config 文件,即当前为空配置时,将自动使用初始配置。
初始配置说明:
amebaxxx_gcc_project/default.conf中记录了该型号 SoC 默认需要打开的配置项,此文件将作为该 SoC 项目的配置初始值。特别地,当通过命令
build.py -a指定一个 example 或在 工程路径 进行编译时,该路径下的prj.conf(如有)也将作为项目的初始配置生效,且优先级高于amebaxxx_gcc_project路径下的default.conf。default.conf和prj.conf中未定义的项,将采用 Kconfig 中的 default 值作为初始值。
配置流程如下所示:
其他配置命令
1. 清理配置
以下命令会清理当前项目的配置 (
menuconfig文件夹)及编译产物(如有,默认在build文件夹)。menuconfig.py -c
2. 通过 conf 文件配置
用户可以将一些配置项组合保存成
.conf后缀的配置集合文件,代替可视化界面中的手动选择。这样只需要一条指令就可以完成项目的配置。关于 conf 文件更详细的介绍,请参见 conf 文件介绍menuconfig.py -f <name1>.conf <name2>.conf ...
<name1>.conf,<name2>.conf为用户命名的配置集合文件。运行
menuconfig.py -f命令时,可以指定一个或多个.conf文件。如果多个.conf文件中存在相同配置项,<name2>.conf的优先级将高于<name1>.conf。例如,如果
<name1>.conf中定义了CONFIG_BT_MENU=y,<name2>.conf中定义了CONFIG_BT_MENU=n,那么最终CONFIG_BT_MENU=n将会生效。备注
在
-f执行之前,会先自动删除menuconfig文件夹,这样通过-f配置后的结果不会受到前一次.config文件的影响,即这种-f的配置方式是 无记忆的。执行此命令会自动将
default.conf加载为第一个输入文件。
3. 生成 conf 文件
如果用户不希望手动编写
.conf文件,可以先运行menuconfig.py利用可视化界面进行手动配置,退出后通过menuconfig.py -s命令将本次配置结果保存为<name>.conf文件。之后,用户可以利用menuconfig.py -f <name>.conf对保存的.conf文件进行加载。menuconfig.py -s <name>.conf
编译代码
Realtek 提供 build.py 脚本来简化项目的编译,常用指令如下表所示:
功能 |
命令 |
描述 |
|---|---|---|
帮助 |
|
列出支持的命令 |
编译 |
|
增量编译工程 |
纯净编译 |
|
移除所有产物并编译工程 |
指定示例 |
|
编译名为 APP 的示例 |
指定目标 |
|
编译指定的 target |
清理 |
|
清理编译产物 |
调试 |
|
进入调试模式 |
帮助指令
如果您是第一次使用 build.py 脚本,可以通过以下命令了解此脚本的用法:
build.py -h
通过 -h 或 --help 选项,所有支持的命令将会被列出。
build.py -h
usage: build.py [-h] [-a APP] [-c] [-p]
[-g {flashloader,imgtool_flashloader,gen_imgtool_floader}]
[-gdb] [-debug] [-D DEFINED [DEFINED ...]] [--new NEW [NEW ...]]
options:
-h, --help show this help message and exit
-a APP, --app APP application path
-c, --clean clean
-p, --pristine pristine build
-g {flashloader,imgtool_flashloader,gen_imgtool_floader}, --target {flashloader,imgtool_flashloader,gen_imgtool_floader}
custom target
-gdb, --gdb gdb
-debug, --debug debug
-D DEFINED [DEFINED ...], --Defined DEFINED [DEFINED ...]
user defined variables
--new NEW [NEW ...] build.py --new-prj <target_dir> [-a <APP>]
纯净编译
纯净编译意味着此次编译环境没有之前残留产物的影响,所有之前编译的产物及配置项都会在此次编译之前被移除。 -p 选项和 --pristine 选项等价。
build.py -p
备注
纯净编译同时会移除
menuconfig文件夹,之前的配置内容也将被丢弃,本次编译将会使用 初始配置。如果仅需清理编译产物但保留之前的配置选项,请使用
build.py -c命令进行清理。
增量编译
如果不带任何参数,项目将会进行增量编译,增量编译和全量编译相比会大大节省时间。
build.py
编译指定示例
${SDK}/component/example 目录下提供了丰富的应用示例。如果您想要编译其中一个示例,可以通过 -a 或 --app 将应用名称或应用路径传递给 build.py。
build.py -a <APP>
例如,需要编译 ${SDK}/component/example/network_protocol/http_client 示例,可以输入以下命令:
build.py -a ${SDK}/component/example/network_protocol/http_client
//or
build.py -a http_client
如果不通过 -a 传入应用名称或路径,将编译默认应用(仅使能无线连接)。
备注
example 目录下提供了名为
prj.conf的文件,当用户未配置过项目时,build.py -a <APP>将会组合amebaxxx_gcc_project/default.conf与example/.../<APP>/prj.conf以使用 初始配置。如果当前 SoC 目录下已有
menuconfig文件夹,可先通过menuconfig.py -f /.../prj.conf配置或手动重新配置,然后使用build.py -a <APP>编译,也可以直接使用build.py -a <APP> -p删除之前的配置项。
编译指定目标
默认情况下,所有必要的目标将被一起编译。
可通过
-g或--target选项单独编译特定的目标可通过
-h选项查看所有可用目标
build.py -g <TARGET>
例如,要重新生成 imgtool flashloader,需输入以下命令:
build.py -g gen_imgtool_floader
项目清理
-c 和 --clean 都可以清理当前项目的产物及中间文件,但 .config 配置文件会被保留。
build.py -c
传递 CMake 的 Cache 变量
CMake 可以通过 -D 选项设置 Cache 变量的初始值。为了继承这一功能, build.py 也同样支持 -D 选项。CMake 预定义的值和用户自定义的值都可以放在 -D 后面。
build.py -D CACHE_VAL1=VALUE1 CACHE_VAL2=VALUE2 …
更多关于本项目 Cache 变量的描述,请参考 ${SDK}/amebaxxx_gcc_project 目录下的 CMakeLists.txt 文件。
备注
CMake 原生的 -D 与 build.py 的 -D 的不同之处如下:
CMake 要求每个变量定义前都要有
-D前缀,例如:-DCACHE_VAL1=VALUE1 -DCACHE_VAL2=VALUE2。build.py要求所有变量跟随在一个单独的-D后面,并在-D和变量之间留有空格。例如:-D CACHE_VAL1=VALUE1 CACHE_VAL2=VALUE2。
固件文件(Image)
编译完成后,固件将被拷贝到
\amebadplus_gcc_project路径下,用户也可以在如下文件夹看到固件:\amebadplus_gcc_project\project_km0\asdk\image\amebadplus_gcc_project\project_km4\asdk\image
CMake 生成的中间文件将会被存放在
build文件夹。如果生成失败, 尝试运行
build.py -c后重新编译。
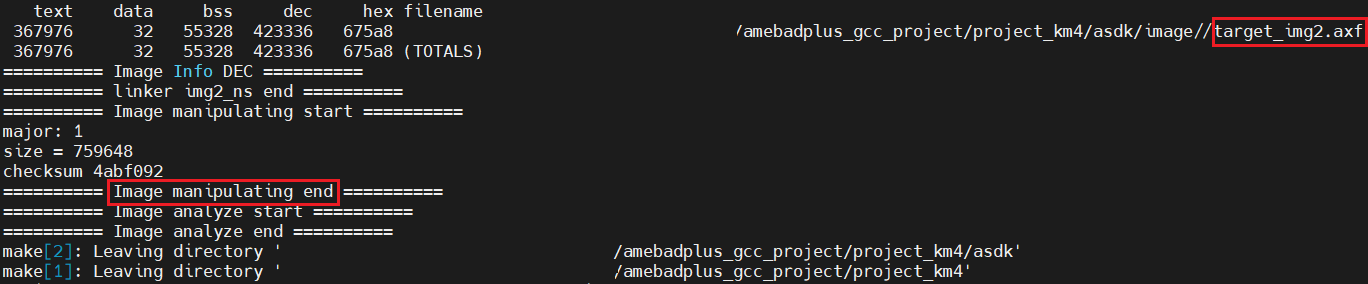
KM4 & KM0 工程编译日志
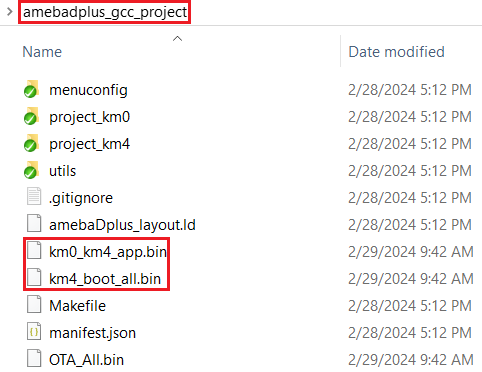
KM4 & KM0 固件生成
备注
如果想要获取 .map 文件进行调试, 请在如下路径中查找:
\amebadplus_gcc_project\project_km0\asdk\image\amebadplus_gcc_project\project_km4\asdk\image
编译完成后,固件将被拷贝到
\amebalite_gcc_project路径下,用户也可以在如下文件夹看到固件:\amebalite_gcc_project\project_km0\asdk\image\amebalite_gcc_project\project_km4\asdk\image
CMake 生成的中间文件将会被存放在
build文件夹。如果生成失败, 尝试运行
build.py -c后重新编译。
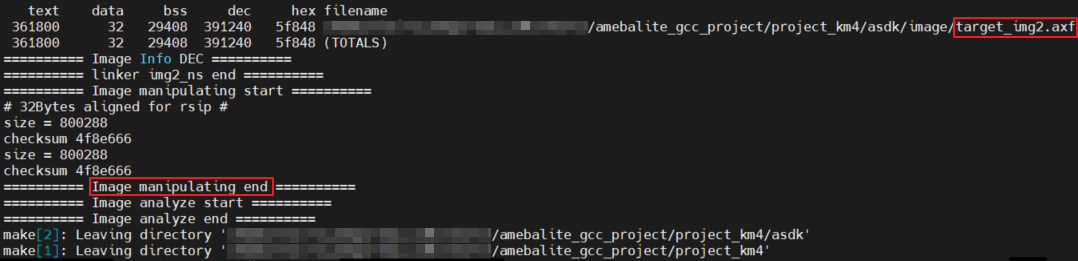
KM4 & KR4 工程编译日志
KM4 & KR4 固件生成
备注
如果想要获取 .map 文件进行调试, 请在如下路径中查找:
amebalite_gcc_project\project_kr4\vsdk\imageamebalite_gcc_project\project_km4\asdk\image
编译完成后,固件将被拷贝到
\amebalite_gcc_project路径下,用户也可以在如下文件夹看到固件:\amebalite_gcc_project\project_km0\asdk\image\amebalite_gcc_project\project_km4\asdk\image
CMake 生成的中间文件将会被存放在
build文件夹。如果生成失败, 尝试运行
build.py -c后重新编译。
KM4 & KR4 工程编译日志
KM4 & KR4 固件生成
备注
如果想要获取 .map 文件进行调试, 请在如下路径中查找:
amebalite_gcc_project\project_kr4\vsdk\imageamebalite_gcc_project\project_km4\asdk\image
编译完成后,固件将被拷贝到
\amebalite_gcc_project路径下,用户也可以在如下文件夹看到固件:\amebalite_gcc_project\project_km0\asdk\image\amebalite_gcc_project\project_km4\asdk\image
CMake 生成的中间文件将会被存放在
build文件夹。如果生成失败, 尝试运行
build.py -c后重新编译。
KM4 & KR4 工程编译日志
KM4 & KR4 固件生成
备注
如果想要获取 .map 文件进行调试, 请在如下路径中查找:
amebalite_gcc_project\project_kr4\vsdk\imageamebalite_gcc_project\project_km4\asdk\image
编译完成后,固件将被拷贝到
\amebasmart_gcc_project路径下,用户也可以在如下文件夹看到固件:\amebasmart_gcc_project\project_hp\asdk\image\amebasmart_gcc_project\project_lp\asdk\image\amebasmart_gcc_project\project_ap\asdk\image
CMake 生成的中间文件将会被存放在
build文件夹。如果生成失败, 尝试运行
build.py -c后重新编译。

KM4 & KM0 & CA32 编译日志
KM4 & KM0 & CA32 固件生成
备注
如果想要获取 .map 文件进行调试, 请在如下路径中查找:
\amebasmart_gcc_project\project_hp\asdk\image\amebasmart_gcc_project\project_lp\asdk\image\amebasmart_gcc_project\project_ap\asdk\image
编译完成后,固件将被拷贝到
\amebagreen2_gcc_project路径下,用户也可以在如下文件夹看到固件:\amebagreen2_gcc_project\project_km4tz\asdk\image\amebagreen2_gcc_project\project_km4ns\asdk\image
CMake 生成的中间文件将会被存放在
build文件夹。如果生成失败, 尝试运行
build.py -c后重新编译。TBD:添加编译 log 截图
KM4_TZ & KM4_NS 工程编译日志
KM4_TZ & KM4_NS 固件生成
备注
如果想要获取
.map文件进行调试, 请在如下路径中查找:
\amebagreen2_gcc_project\project_km4tz\asdk\image\amebagreen2_gcc_project\project_km4ns\asdk\image
创建外部工程
前文介绍了如何在 amebaxxx_gcc_project 目录下进行配置与编译,这种模式下用户将在 Realtek 提供的 SDK 中开发自己的项目。但在一些场景下,用户希望创建独立于 Realtek SDK 的工程目录,方便独立维护或更新,或方便多团队开发。下文介绍基于外部工程的开发模式。
1. 创建命令
进入到 SoC 对应的 GCC project 路径下,运行:
cd {SDK}/amebaxxx_gcc_project build.py --new <project_dir> [-a <APP_NAME>]将以 example 中的
APP_NAME为模板,在project_dir路径下建立新的工程。例如:build.py --new ~/my_project -a http_client工程路径下包含:
ameba.batameba.sh:用户可以通过这些脚本设置环境变量。
menuconfig.pybuild.py:用于配置及编译工程
CMakeLists.txt:编译此新建工程的入口文件
Kconfig:在此可添加用户自己的配置项
<APP_NAME>文件夹:指定模板的文件将被拷贝至相应文件夹
prj.conf:用于记录该工程的默认配置
2. 在创建的工程目录下设置环境
工程目录下的
ameba.bat和ameba.sh建立了对 Realtek SDK 根目录下同名脚本的引用,用户可通过任意位置的脚本设置环境。
3. 在创建的工程目录下配置
使用方法同 配置 SDK 中的命令。配置生成的
menuconfig文件夹将会生成在此工程目录下。
4. 在创建的工程目录下编译
使用方法同 编译 SDK 中的命令。编译生成的
build文件夹将会生成在此工程目录下。
固件下载
我们提供了 ImageTool 专门用于固件的下载,请参考 Image Tool。